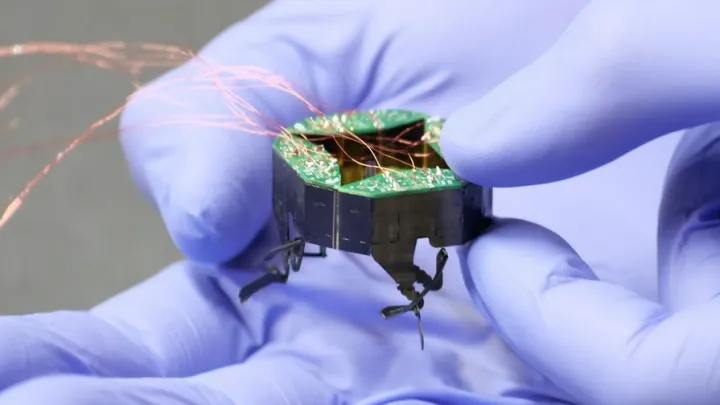
Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.