Крошечные роботы могут быть очень полезными, если необходимо искать выживших среди завалов на месте катастрофы. Поэтому команда из Университета Колорадо (США) создала робота CLARI, который был вдохновлён анатомией насекомых, и этот механический малыш может протискиваться через узкие зазоры.
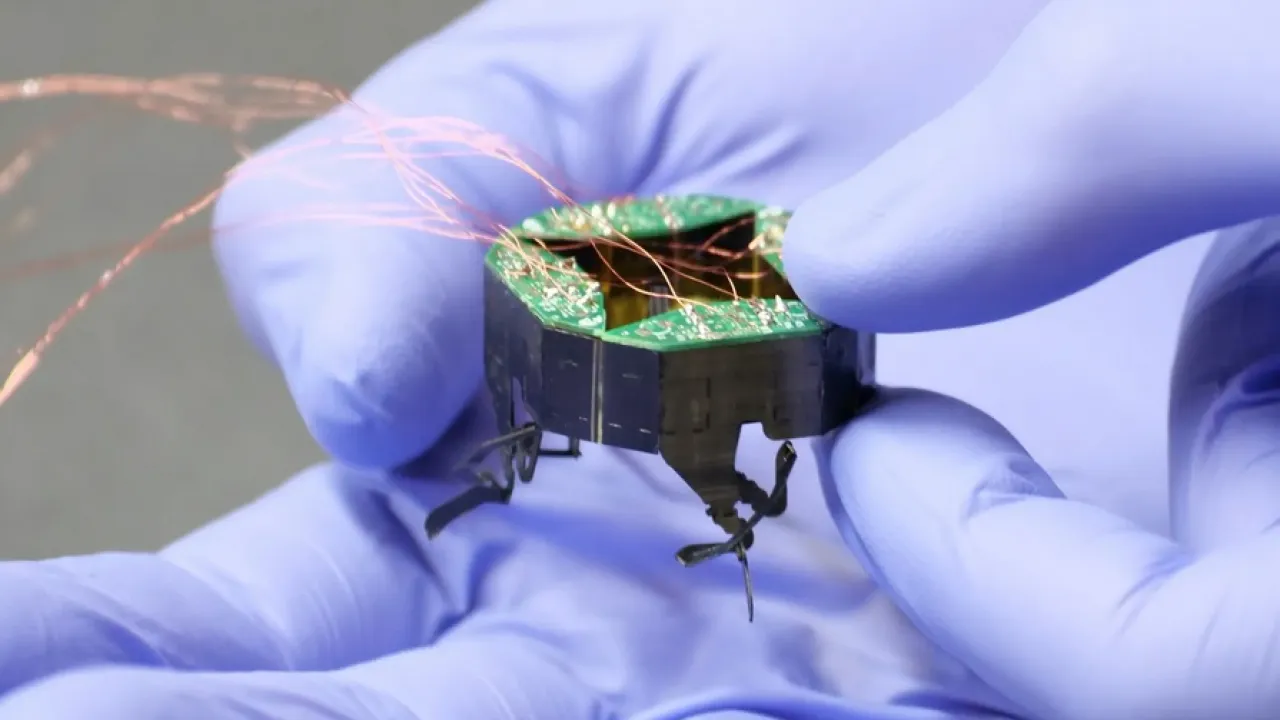
Четвероногий робот CLARI размером примерно с полпальца, при этом квадратное тело механизма состоит из четырёх секций, соединённых друг с другом гибкой оболочкой. Каждая секция содержит печатную плату и двойные приводы, которые перемещают прикреплённую ногу в разные стороны. Благодаря такому строению каждая нога робота может передвигаться независимо от других.
При движении по открытой местности CLARI сохраняет квадратную форму по умолчанию, что обеспечивает ему оптимальную скорость и устойчивость. Однако если робот сталкивается с пропастью, он может трансформироваться, приняв более длинную и узкую форму шириной всего 21 мм. Это позволяет механизму протиснуться через узкие щели и преодолеть сложные препятствия.
Хотя текущая версия CLARI подключена к источнику питания, инженеры планируют разработать автономную версию с собственным аккумулятором и датчиками. Кроме того, учёные планируют сделать этих роботов ещё меньше, а количество ножек увеличить для повышения маневренности.