Китайская компания Unitree показала трансформера в действии GD01 наглядно показывает прогресс в робототехнике.Интересное решение: в Иране есть необычный дом-трансформер Sharifi-ha House Легким движением руки комнаты превращаются в балконы.Квартира-трансформер: на видео сняли удобное решение для однокомнатной квартиры Чудеса технологий и дизайна.Оптимус танк: инновационная игрушка самостоятельно трансформируется в танк Где-то всплакнули дети 90-х.Энтузиаст собрал миниатюрного Бамблби и заставил Сеть рукоплескать Домашний трансформер.Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.
Интересное решение: в Иране есть необычный дом-трансформер Sharifi-ha House Легким движением руки комнаты превращаются в балконы.Квартира-трансформер: на видео сняли удобное решение для однокомнатной квартиры Чудеса технологий и дизайна.Оптимус танк: инновационная игрушка самостоятельно трансформируется в танк Где-то всплакнули дети 90-х.Энтузиаст собрал миниатюрного Бамблби и заставил Сеть рукоплескать Домашний трансформер.Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.
Квартира-трансформер: на видео сняли удобное решение для однокомнатной квартиры Чудеса технологий и дизайна.Оптимус танк: инновационная игрушка самостоятельно трансформируется в танк Где-то всплакнули дети 90-х.Энтузиаст собрал миниатюрного Бамблби и заставил Сеть рукоплескать Домашний трансформер.Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.
Оптимус танк: инновационная игрушка самостоятельно трансформируется в танк Где-то всплакнули дети 90-х.Энтузиаст собрал миниатюрного Бамблби и заставил Сеть рукоплескать Домашний трансформер.Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.
Энтузиаст собрал миниатюрного Бамблби и заставил Сеть рукоплескать Домашний трансформер.Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.
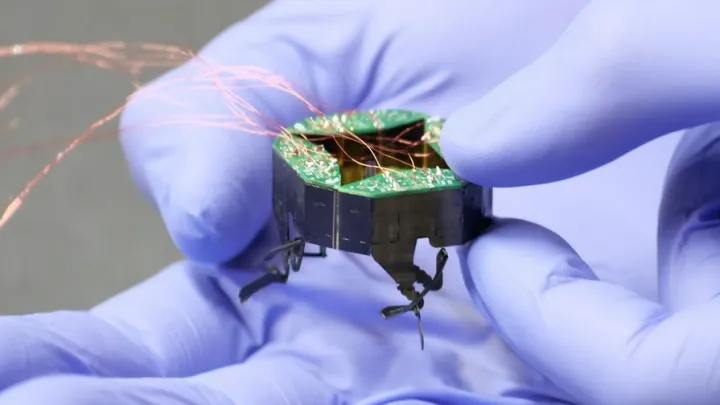
Разработан робот-трансформер, который протискивается в узкие щели У механизма четыре подвижных ножки.